2025
-
Twin-embedded MPC for longitudinal/lateral vehicle control
Development of a high-fidelity, physics-based vehicle dynamics simulator in Modelica/Dymola, integrated with a digital twin for predictive control tasks.
Key question: Can we reliably initialize a simulator using observed vehicle states?
Tools & Skills: Modelica/Dymola, Python, Matlab, Simulink
- Development of physics-based digital twin
- Integration with Model Predictive Control frameworks
- Development of black-box non-linear controller (e.g., Bayesian Optimization [BO])
- Testing in simulation
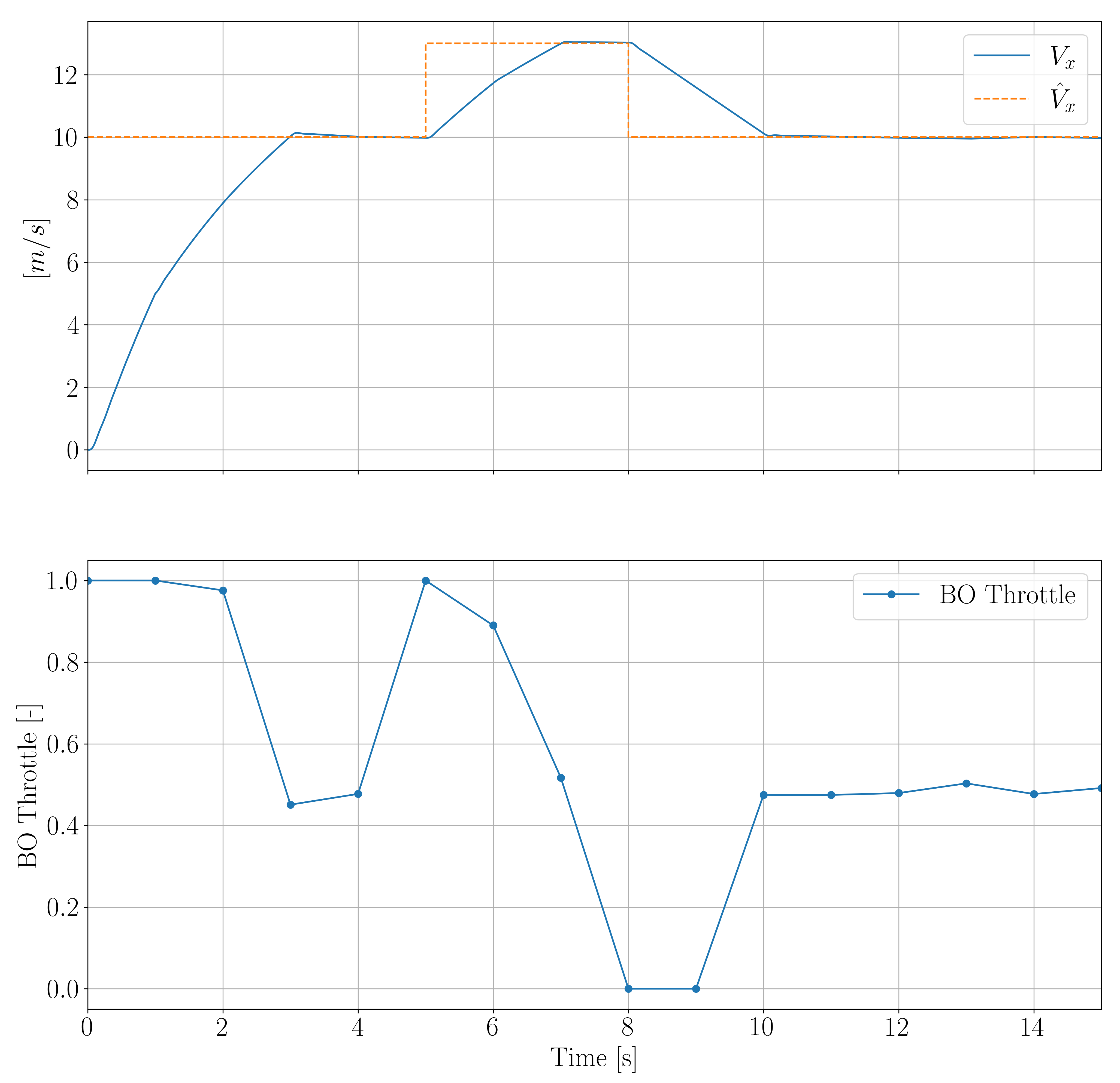
Cruise control application – Bayesian-based throttle controller.
-
Man-in-the-Middle (MiTM) Attack Detection [Cybersecurity/ML]
Development of detection algorithms against MiTM attacks on control systems, focusing on resilient predictive controllers.
Tools & Skills: Kali Linux, Python, PyTorch/TensorFlow, Wireshark, Matlab, Simulink
- Experimental deployment on actual networks
- In-depth study of industrial communication protocols
- Development of ML-based intrusion detection algorithms
- Design and testing of resilient predictive controllers under attack
Man-in-the-Middle - Let's detect it!